
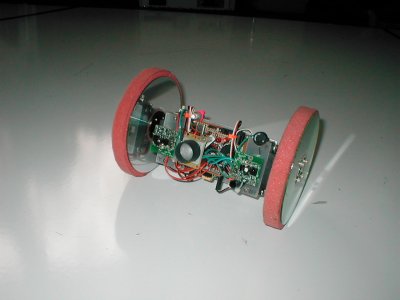
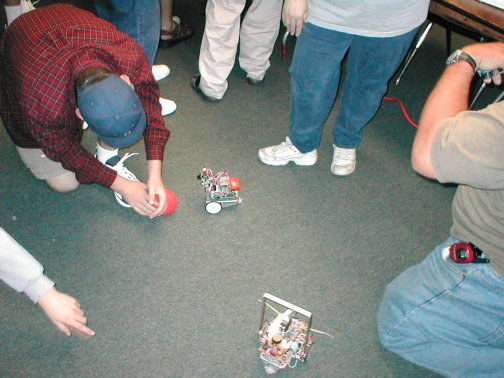
Overall View of Rollie

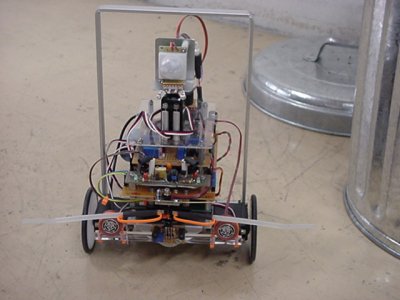
Front View showing Heat Sensor, IR avoidance module and Beeper
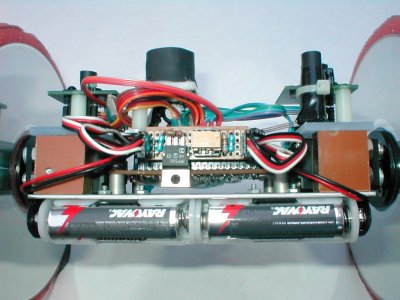
Top View showing servo disconnect circuit to save power
Specifications for 'ROLLIE"
ROLLIE has only two wheels to roll on; each wheel is a pair of CD discs with a foam center. The foam center conforms to the surface and helps provide traction with the floor. The robot's battery pack is toward the bottom and lowers its center of balance. Rollie can move forward, backward, stop and turn upon its center.
Computer:
A 16F84 PIC microcontroller from Microchip, running at 20 Mhz is the
brain for the robot. Programming can be downloaded "in circuit"
using
a serial link with a PC. Rollie is
programmed in Basic using Pic Basic Pro(c) from MicroEngineering
Labs.
Servos:
Each wheel is driven by a servo modified for continuous rotation.
The servos can be completely powered down using a Mosfet as a switch
under
software control. This conserves considerable power.
Sensors:
IR emitting LEDs are pulsed at 38kc and integrated circuit receiver
modules tuned to this frequency, are used to detect and avoid obstacles
with very little interference from other light sources.
A separate 38kc receiver is used to receive command instructions and detect an IR beacon for location purposes. To prevent interference from the IR emitting LEDs, the 38kc receiver is read between avoidance routines. A heat sensing PIR (Passive InfraRed) motion sensor is used to detect people or hot objects.
Power:
Four "AA" alkaline Rayovac(tm)
rechargeable cells provide power for about 2 hours before recharging is
necessary.
Control:
Rollie's autonomous behavior can be interrupted using a specially made
IR remote control to help guide the robot out of dangerous
situations.
An on-board mode switch can cycle the robot through different
behaviors.
Mission:
Rollie's primary mission is to move forward and avoid obstacles, find
people and move toward them. A blue LED flashes and a beeper
sounds
at different times to alert people of its presence. If Rollie
cannot
find obstacles, people or the IR beacon, the robot will power down to
"watch
dog mode" and wait for stimulus. Future additions: replace foam
wheels
with conductive foam to allow charging through the wheels in contact
with
a "charging pad". An IR beacon at the pad will guide Rollie when
charging is required.

Rollie, along with some members
of the Botball Team representing Cesar
Chavez Middle School at the 2003 Kaiser Hospital Earth Day.
Program Files for Rollie
![]() rolly4.bas
Program written in Pic Pro Basic
rolly4.bas
Program written in Pic Pro Basic
![]() rolly4.hex
Hex file for rollie4.hex for use with a Pic 16F84A 20 MHz
rolly4.hex
Hex file for rollie4.hex for use with a Pic 16F84A 20 MHz
![]() blink.bas
Test program that blinks rollie's red LED
blink.bas
Test program that blinks rollie's red LED
![]() blink.hex
Hex file for blink.bas
blink.hex
Hex file for blink.bas
Links:


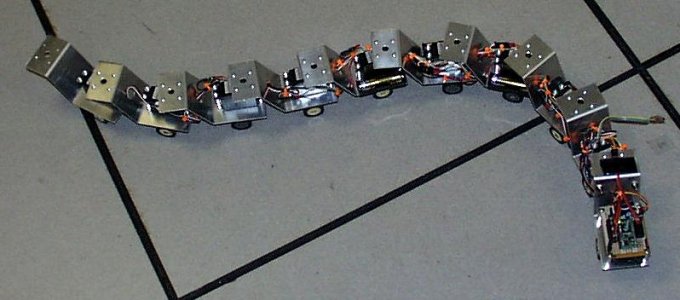
Slither at the 2002 RSA Winter Games at Fort Mason. Link
Slither at the 1st National Botball Robotics Conference Link
Complete Report of the 2001 Robot Games at the San Francisco Exploratorium Link
Shortcut to photos and movies (from the above link)
Whiskers Rollie Whiskers and Rollie Slither(.mov)


 Photos
of ROBOlympics 2004, Fort Mason, San Francisco
Photos
of ROBOlympics 2004, Fort Mason, San Francisco
 Robolaser
Adding a laser to your robot
Robolaser
Adding a laser to your robot
![]() Cambot
Interfacing the CMUcam to a Boebot
Cambot
Interfacing the CMUcam to a Boebot
 BaliBot
An Inverted Pedulium Robot
BaliBot
An Inverted Pedulium Robot
 Fingerboard
Runs Interactive C
Fingerboard
Runs Interactive C
Get yourself a EAS
Fingerboard, run IC4 (a free C compiler) and you have a "Mini Handy
Board".
Project shows how to build a robot that uses
the 68HC11 MCU and runs programs written in C.
 Bill's
Bot
Our local
high school robotics club entered RSA's mini sumo robot contest
Bill's
Bot
Our local
high school robotics club entered RSA's mini sumo robot contest
Mini Sumo Robot.and
needed someone to compete with. So I built "Bill's Bot".
 ROBOT
FREAKS OUT NEIGHBOR!
ROBOT
FREAKS OUT NEIGHBOR!
Mark Sherman's Projects
 Virtual
State Machine An attempt to create a
complete
virtual machine interpreter.
Virtual
State Machine An attempt to create a
complete
virtual machine interpreter.
 Curve Tracer To
investigate the I-V charteristics
of iron pyrites a PC controlled curve tracer was built.
Curve Tracer To
investigate the I-V charteristics
of iron pyrites a PC controlled curve tracer was built.
 PIC-KEY
Updated 10-31-04 A simple
to
make In-Circuit Programming Tool for PIC's
PIC-KEY
Updated 10-31-04 A simple
to
make In-Circuit Programming Tool for PIC's
 Comet Hale-Bopp
Remember
Comet Hale-Bopp in 1997? Here are some photos I made
while in Michigan.
Comet Hale-Bopp
Remember
Comet Hale-Bopp in 1997? Here are some photos I made
while in Michigan.
![]() Eclipse
of 2002 Taking
photos
of the Sunset Eclipse.
Eclipse
of 2002 Taking
photos
of the Sunset Eclipse.
 Lightning
Almost foolproof method to get the shot.
Lightning
Almost foolproof method to get the shot.
Becky's
Webpage LadyBot's
own projects and stuff.
 Email me
(Bill Sherman) If you have any questions at:
Email me
(Bill Sherman) If you have any questions at:


This Site is Permanently Under Construction
Last update Dec 28, 2013

{kind=link}
{kind=link}
{kind=link}